To
understand how
the pelvic angle of
the Apso affects its movement,
we must first understand the normal anatomy of the canine and the
action
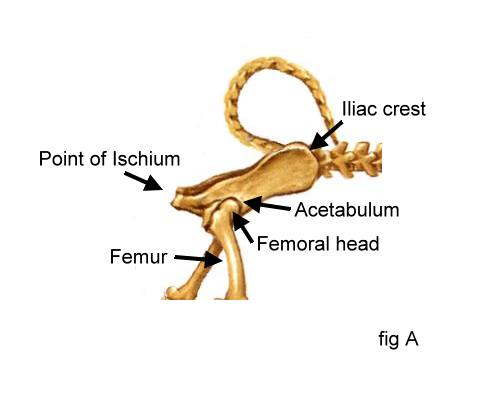
of the hip joint. The pelvic angle is defined for the
purposes of
this article as the angle of the long axis of the pelvis from iliac
crest
to distalmost point of ischium, relative to the horizontal. (fig.
A).
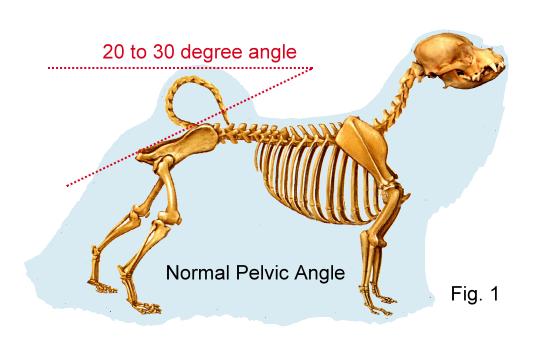
The normal pelvic angle in the canine is about - 30 degrees.
The
part of the pelvis which attaches to the lumbar spine and tail is the
sacrum,
which is made up of several fused segments of the spine itself. Because
the apso carries it's tail well over the back, the tail is "set on"
in a higher position than in low-tailed breeds. This higher tailset is
achieved by a slight tipping of the sacrum, so that the pelvic angle in
this breed is often somewhat less than the normal (wolf type) 30 degree
angle and more often about 20 - 25 degrees. (fig 1)
The femur moves in the hip socket (Acetabulum) by means of a ball joint. There is quite a range of movement within the socket, but it is not unlimited. The movement has a forward and backward limit imposed by the dimensions of the acetabulum, the shape of the femoral head, and by the ligaments and muscles surrounding the joint.
This normal range
of movement allows
the rear foot to be brought
well under the dog, contacting the ground and gripping the surface to
propel
the body forward. Finally at the end of the stride, the foot
is
picked
up and immediately begins a recovery to a forward position. The normal
range of motion allows maximal contact with the ground. In
the
normal
recovery phase, the foot remains fairly close to the ground: the foot
raised
only so high as to allow adequate clearance. (fig.3)
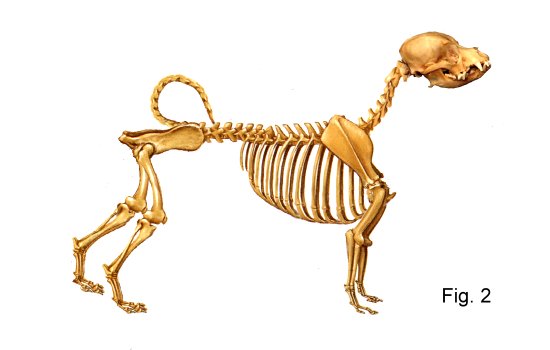
The
flat pelvis is shown in fig 2. Compare it to the
normal (fig
1). Dogs with this flat or tipped pelvis often have
a
straight
shoulder (upright scapula), lacking layback of shoulder. (Figure 2 does
not illustrate that - but shows a normal front with the flat pelvis)
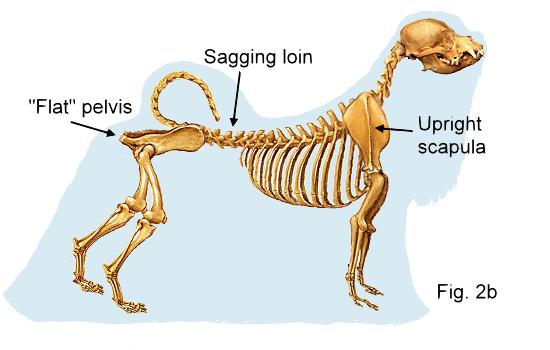
Another
frequent effect of the flat or tipped pelvis is a lordotic or
swaybacked
lumbar spine resulting from the angle of attachment of the
spine.
The normal canine loin (lumbar spine) is slightly arched allowing for
strength
and the action of the "rearing" muscles. Weakness in this area
can result in serious spinal problems. A graphic depiction of all three
problems (slack loin, flat pelvis, and upright scapula) is
seen in
fig.2b)
The flat or tipped pelvis changes the mechanics of rear movement. (fig 3) Because of the abnormal angulation of the pelvis, the range of motion of the femur, and thus the entire rear leg, is limited anteriorly and exaggerated posteriorly. The foot cannot be brought forward to it's normal extension under the dog, but rather strikes the ground very nearly under the hip joint.
The arc of motion
of the femur
then forces the foot to leave
the ground prematurely and swing in the air to an elevated
position.
Recovery begins at this abnormally high position, which can be seen as
an exaggerated vertical piston-like action in the rear.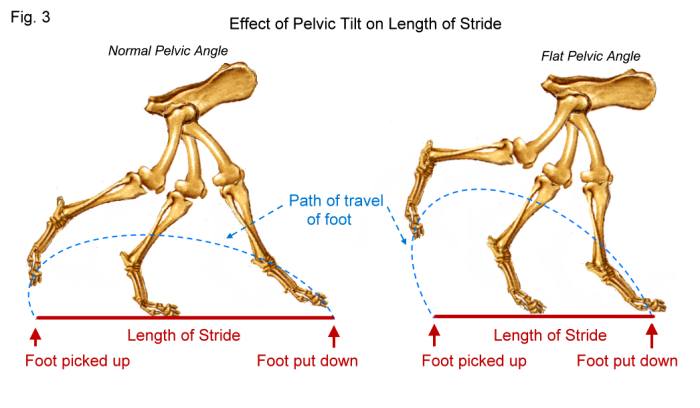
As
result
of the abnormal pelvic
tilt, and the physical
limitation
of rotation of the hip joint, the anatomical arc of motion of the femur
is unable to achieve a normal length of stride, and a good deal of the
energy meant to propel the dog is wasted as motion in the
air.
The
dog compensates for this limitation of stride and propulsion by taking
extra steps to cover the same ground. This mechanical
disadvantage
is inconsistent with the breed origin of this animal - a dog which must
be able to thrive at very high elevation in the Himalayas. At
12,000
to 16,000 feet, wasting energy is wasting oxygen, incompatible with
survival,
and therefore untypical of the true Lhasa Apso.
It seems that many observers
tend to
equate furious action (many small
steps) and high flinging of the rear legs with "drive" and interpret
this "windmilling" activity in the rear as good movement.
In fact, some breeders have actively selected for this type of
construction
and movement. However if one stops to consider that in any
land-based
locomotion, "drive" only takes place with the traction on the
ground, it becomes obvious that feet flailing in the air are not
contributing
to forward propulsion, however exciting it may look! Smooth,
efficient
movement depends on balanced movement of the limb both in forward reach
and backward extension where the "rubber meets the road" - ON
THE GROUND.